Copyright © Panorama Group 1991 - 2024

On the geoportal , the map of the Altai and Trans-Baikal Krais, formed according to OpenStreetMap data, were updated. Source data obtained from the GIS-Lab website are complemented by objects from maps of scale 1: 1 000 000. There are added the objects of hydrography, vegetation, road network. For work with the received maps it is possible to use the program of or other software products of KB "Panorama".
Publishing of updates in bank of spatial data is made by using the program of . Publishing contents of bank of spatial data on the geoportal and data access for downloading are implemented by means of .
Free maps on the basis of OpenStreetMap data are available for download on the page "Digital maps and images".





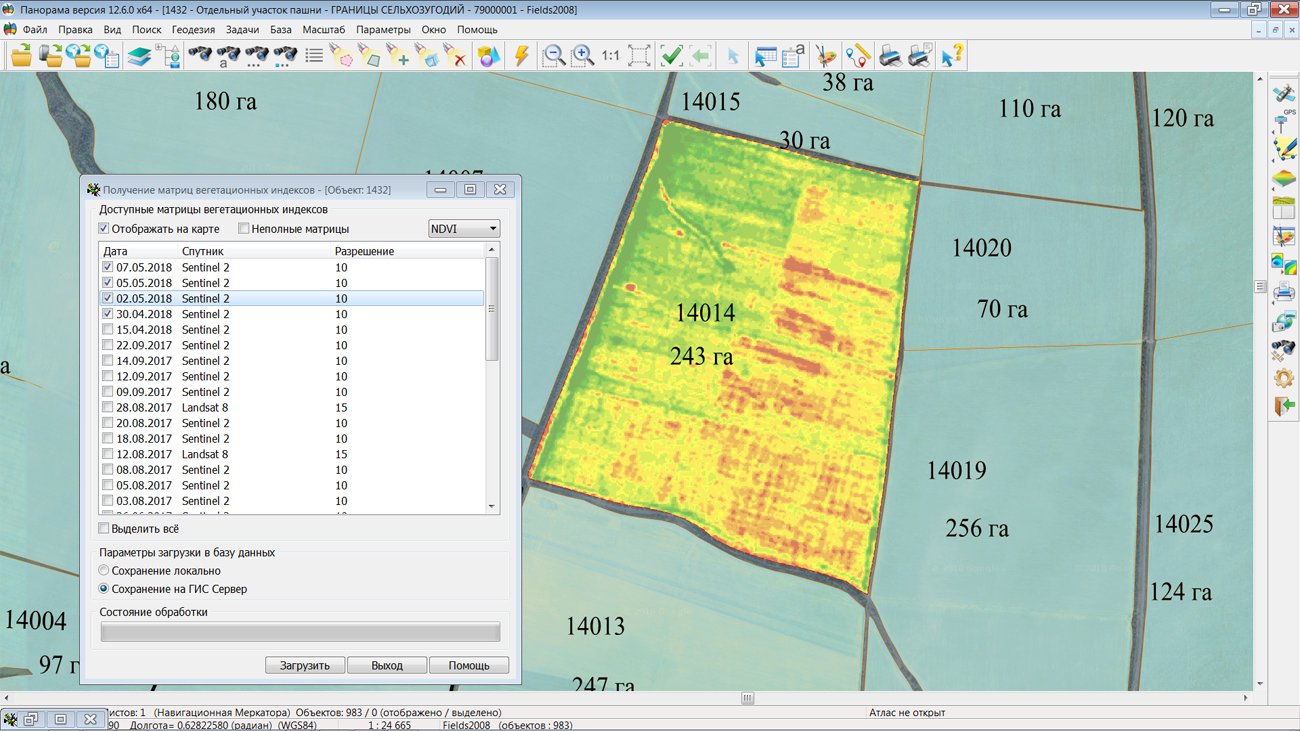
In KB "Panorama" the "Workstation of agronomist" version 12.6 is developed. In the new version in the "Complex of agronomical tasks" the tools of satellite monitoring of agricultural land contours are implemented. New software tools form a single system for obtaining, storing and analyzing the main types of vegetation indices in the form of quality matrixes and average values over the field contour. Vegetation indices are biomass status indicators during the vegetation period, calculated on the basis of multispectral remote sensing data of the Earth. Monitoring the values of the indices during the season makes it possible to predict yields and on-time to determine fields with low efficiency.
Modes "Obtaining matrixes of vegetation indices" and "Obtaining average NDVI values" provide an interface for interaction with an external Geosys service. These modes allow you to upload matrixes of qualities with values of the indices Normalized Difference Vegetation Index (NDVI), Chlorophyll Vegetation Index (CVI), Enhanced Vegetation Index (EVI), Green Normalized Difference Vegetation Index (GNDVI) and the average daily value on the contour of the field over the past 10 years. The downloaded data is stored on the user's computer or in a virtual folder and can be integrated into a single database of agro-enterprise the . When creating requests for an external service, the "Sowing date" attribute is used from the "Field passport" dialog and a coordinate description of the field contour.
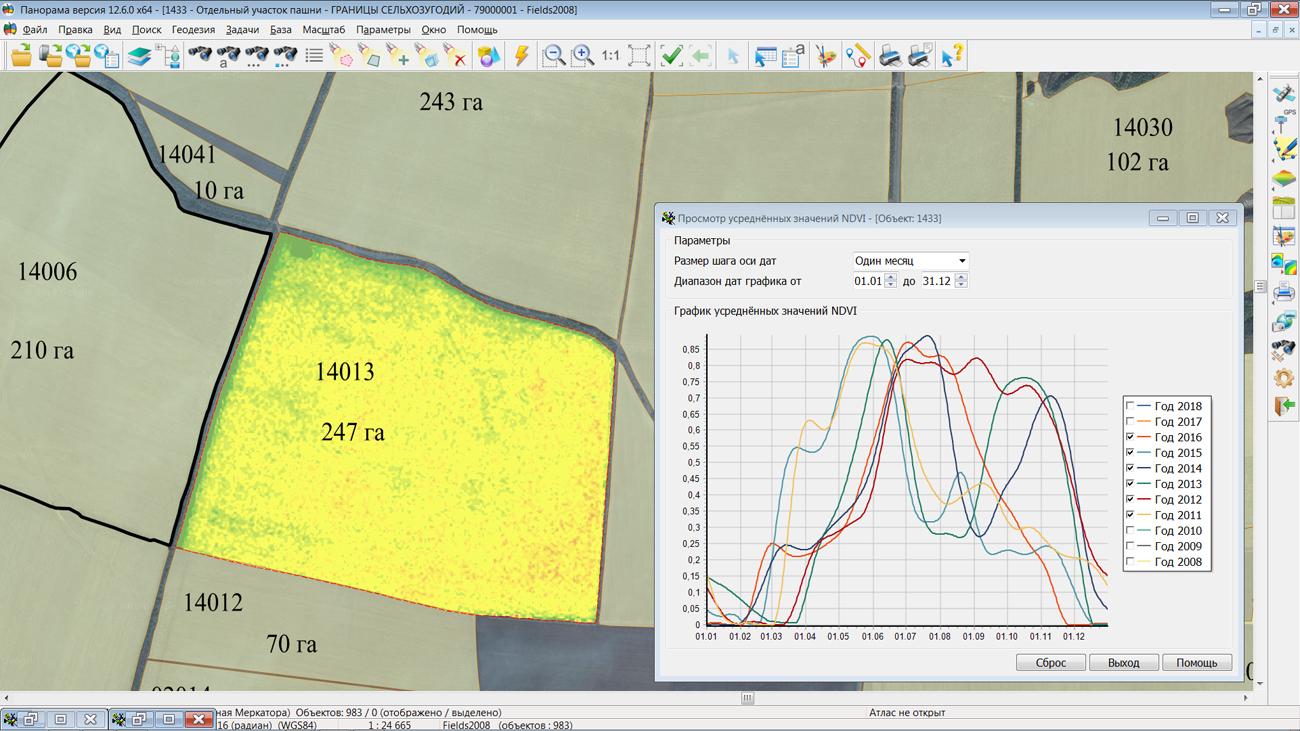
To work with received matrixes within the scope of a single environment, the mode "View matrixes of vegetation indices" has been adapted. It allows you to view and manage the matrixes of vegetation indices from database the GIS "Panorama AGRO". In the new mode, "Viewing of average NDVI values", an interactive graph of the average daily values of the index for several seasons (crop year) is displayed. Analysis of the graph allows us to assess the dynamics of the development of the field's biomass for different seasons. The presence of "failures" or "peaks" may reflect the effectiveness of ongoing agrotechnical activities.The satellite monitoring data loaded into the "Panorama AGRO" database is available for analysis in .
A new version of the program is available on the site in the section.


The has presented on May, 28th, 2018 in MIIGAiK at the the presentation about domestic technology of support of unmanned driving of vehicles. The essence of the technology consists in the preparation and continuous issuance of actual and calculated parameters of the movement (coordinates, course, speed) from the precise positioning system and the digital model of the road to the vehicle and the formation on their basis of control actions onto the executive mechanisms of the unmanned vehicle.
The system of precise positioning provides a highly accurate (3-5 cm) positioning of moving vehicles in real time. As the technical basis of the high-precision coordinate system, there are used the developed software and the hardware of satellite base stations series-produced by the Russian Institute of Radio Navigation and Time.
Layers of spatial data of the digital road model are created in the environment using the automated technology of downloading the results of road measurements obtained by the specialized road laboratory of the NPO "Region" with the use of mobile laser scanning.
The digital road model is published in the form of cartographic web-service that provides external consumers with information on structural lines of road, rational trajectory and safe high-speed mode of vehicle movement. For web-service creation the software products of KB "Panorama" the and were used.
The presented technology allows to carry out autonomous traffic of vehicles in adverse weather conditions, at night, without equipping the road infrastructure with expensive equipment, and also to minimize the operating costs for the maintenance of the system. Safety of movement from collision with obstacles is provided by means of technical vision.



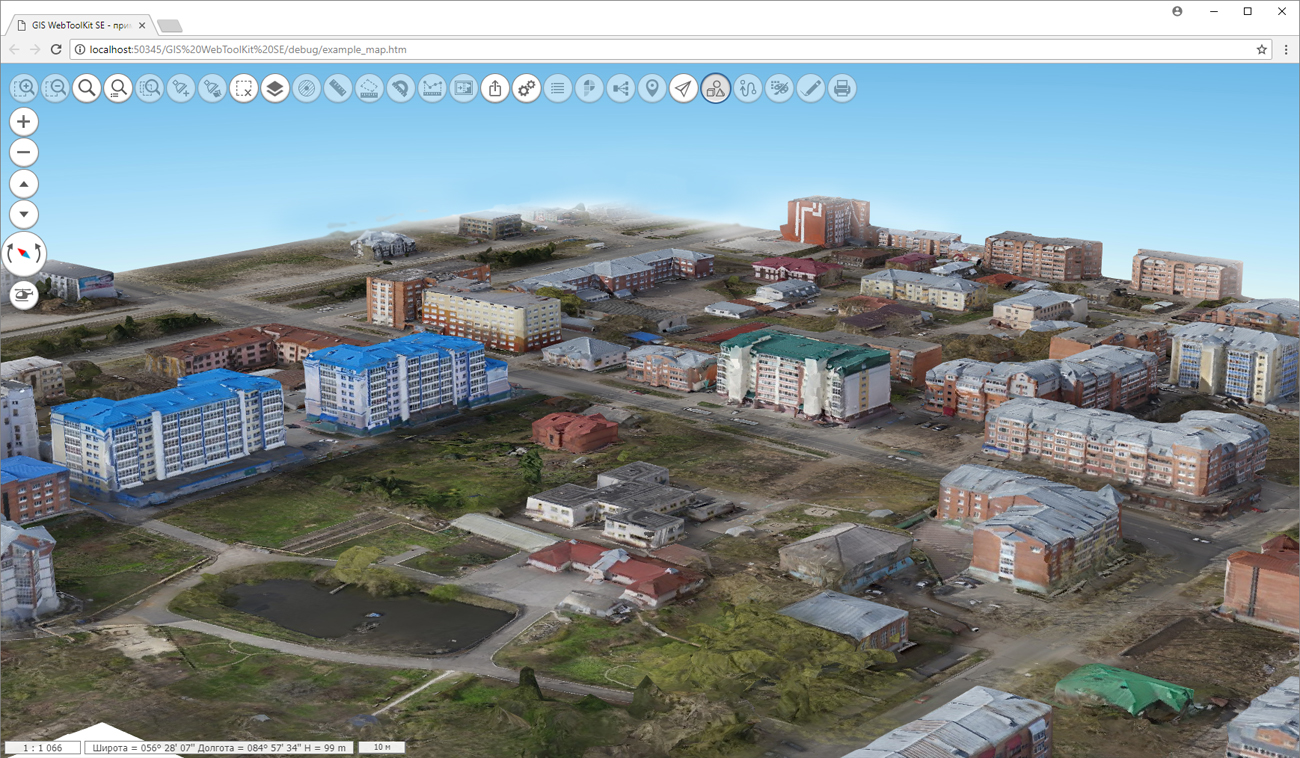
version 3.9 is developed in the KB "Panorama". In the new version of the program the 3D map displays photorealistic three-dimensional models of unlimitedly large size. The models are presented in a new format of tile vector 3D terrain models - DB3D. As a DB3D data source, there is used the of version no less than 12.0.7.
Creation of data in DB3D format is performed in the professional . The technology is developed with the use of importing the tile models in TLS (Agisoft Tiled Model) format, point cloud in Agisoft OC3 format or 3D terrain models in COLLADA format. The example of displaying new three-dimensional models is presented on the . As an example, , provided by the company is used. A high-precision three-dimensional terrain model was obtained using unmanned aerial survey systems and photogrammetric software.Such models are highly informative and expand the possibilities for operational 3D analysis. Mapping the 3D models of DB3D requires a relatively small expenses of the resources of the client application. Managing a transparency of layers of three-dimensional tiles and a background is added.
Possibilities of "Manager of map project " are expanded. The mode provides an opportunity to change the data composition of the map projects. Users can dynamically update the current composition of the map data layers or completely change it. The administration module is updated. A separate page has been added to configure the permissions of the application's users.
The toolkit of developing the Web-applications the GIS WebToolKit SE has been improved, which expands possibilities of GIS WebServer SE and can be integrated into other information systems. Access to data (images, vector maps and terrain information) is provided by Web services using common OGC protocols and ISO standards. Service GIS WebService SE (OGC WMS/WMTS) provides spatial information in the form of graphic images. Various types of high-altitude data are used as a digital elevation model: matrixes (in the formats SRTM, GeoTIFF, IMG, MTW), TIN-models, point cloud and others. At request the most accurate data onto a specified terrain site with a given resolution is automatically sampled. To transfer data of the digital terrain model to the Web, the WCS protocol is used. The relief data is represented as tiles and cached on the client.
As a source of spatial data, the can be. It provides the collection, storage, search and delivery of spatial data in exchange formats, a displaying the state of the data bank in the form of maps-schemes, the automated formation and updating of geo-covers.
GIS WebServer SE is used in the construction of closed corporate systems to ensure the protection of data having a security classification or a trade secret. GIS WebServer SE is certified for Level 2 of absence of undeclared capabilities. The new version of the program expands the application's capabilities in solving problems of analysis, management and long-term planning of the territories development. GIS WebServer SE is implemented using the toolkit of GIS WebToolKit SE, which can be used in development tools that use the JavaScript.
The new version of the program is available on the website in the section.




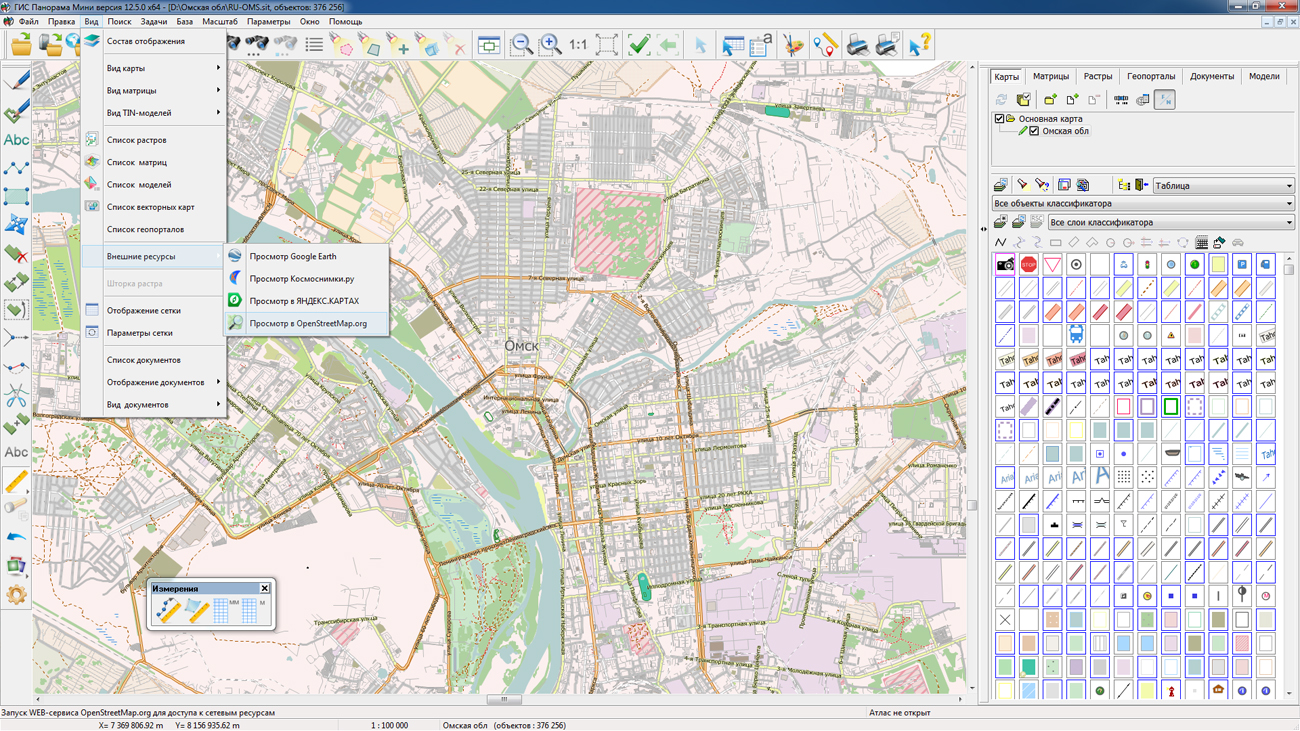
On the geoportal , the map of the Omsk region, formed according to OpenStreetMap data, was updated. Source data obtained from the website are complemented by objects from maps of scale 1: 1 000 000. There are added the objects of hydrography, vegetation, road network. For work with the received maps it is possible to use the program of or other software products of KB "Panorama".
Publishing of updates in bank of spatial data is made by using the program of . Publishing contents of bank of spatial data on the geoportal and data access for downloading are implemented by means of GIS WebServer SE.
Free maps on the basis of OpenStreetMap data are available for download on the page "Digital maps and images".



Ph.: +7 (495) 739-0245, +7 (925) 221-1603
www.gisinfo.ru | panorama@gisinfo.ru
105005, Russia, Moscow, Baumanskaya Street 7, building 1, office 229 (m. Baumanskaya)
Copyright © Panorama Group 1991 - 2024












 Mobile version
Mobile version Full version
Full version